
система визуальной навигации
Система визуальной навигации – термин, который сейчас звучит все чаще, особенно когда речь заходит о робототехнике, автоматизации и промышленном контроле. Но часто он понимается слишком широко, как просто ?визуальное управление?. На самом деле, это гораздо больше, это комплексная система, которая позволяет машине 'видеть' окружающий мир и принимать решения на его основе. В этой статье я хотел бы поделиться своими размышлениями и опытом в этой области, расскажу о типичных проблемах и о том, как мы их решали в ООО Циндао Шигуан Интеллект Технолоджи. Попробую отбросить общие фразы и говорить о конкретике, как будто просто рассказываю коллегам за кружкой кофе.
Что такое настоящая визуальная навигация?
Часто, когда говорят о системе визуальной навигации, подразумевают просто систему распознавания объектов. Например, робот должен просто найти определенный предмет на столе. Это, конечно, часть задачи, но это лишь верхушка айсберга. Настоящая система должна не только видеть, но и понимать окружающую обстановку, строить карту, планировать маршрут и адаптироваться к изменениям. Это уже задача, требующая значительных вычислительных ресурсов и сложной алгоритмической базы. Например, мы работали над проектом автоматизированной сортировки деталей на производстве. Изначально заказчик хотел просто использовать камеры для определения типа детали. Но потом поняли, что нужно учитывать ориентацию детали в пространстве, наличие препятствий, а также адаптироваться к изменениям в расположении деталей на конвейере. Это сразу значительно усложнило задачу.
Проблема, с которой мы сталкивались неоднократно, – это чувствительность системы к освещению. В промышленной среде освещение часто переменное и непредсказуемое. Один и тот же объект может выглядеть совершенно по-разному при разном освещении. Поэтому, очень важно использовать не только камеры, но и другие сенсоры, такие как инфракрасные или структурированные световые источники, которые позволяют получать более надежную информацию об окружающей среде. Без этого, даже самая совершенная алгоритмическая модель может давать сбои.
Вызовы при разработке системы визуальной навигации
Самый прямой вызов – это сложность алгоритмов. Существует множество различных алгоритмов компьютерного зрения, и выбор правильного алгоритма для конкретной задачи – это своего рода искусство. Нужно учитывать такие факторы, как скорость обработки данных, точность распознавания объектов, устойчивость к шуму и изменениям освещения. Мы использовали различные подходы, от классических алгоритмов, основанных на обработке изображений, до современных методов глубокого обучения. Ключевым моментом является не просто выбор алгоритма, а его оптимизация под конкретную аппаратную платформу. Современные GPU могут значительно ускорить процесс обработки изображений, но для этого необходимо правильно организовать параллельные вычисления.
Другая проблема – это интеграция системы визуальной навигации с другими системами управления. Например, робот должен взаимодействовать с другими машинами на производственной линии. Поэтому, необходимо обеспечить обмена данными между системой визуальной навигации и системами управления движением, системами управления производственным процессом и другими системами. Это требует использования стандартизированных протоколов обмена данными и разработки четких интерфейсов. Мы используем ROS (Robot Operating System) для интеграции различных компонентов нашей системы, что значительно упрощает разработку и тестирование.
Наши решения: от прототипа до промышленной установки
В ООО Циндао Шигуан Интеллект Технолоджи мы разрабатываем системы визуальной навигации для широкого спектра применений. Мы начинаем с разработки прототипа, который позволяет проверить основные концепции и алгоритмы. Затем, прототип проходит тестирование в реальных условиях эксплуатации. На основе результатов тестирования проводится оптимизация системы и ее интеграция с другими системами. Например, мы разработали систему визуальной навигации для автономного погрузчика, работающего на складе. Прототип был создан за несколько месяцев, и затем протестирован в реальных условиях эксплуатации. В результате, мы смогли значительно повысить эффективность работы склада и снизить количество ошибок при комплектации заказов.
Важным аспектом нашей работы является разработка пользовательского интерфейса. Оператор должен иметь возможность легко управлять системой и отслеживать ее работу. Поэтому, мы разрабатываем интуитивно понятные интерфейсы, которые позволяют оператору быстро получать информацию о состоянии системы и принимать необходимые решения. Мы используем графические интерфейсы, которые позволяют оператору видеть окружающую обстановку и выбирать маршрут движения робота.
Пример успешной реализации: автоматическая инспекция качества
Одним из интересных проектов, над которым мы работали, была разработка системы визуальной навигации для автоматической инспекции качества продукции. Эта система должна была автоматически определять дефекты на поверхности изделий. Мы использовали несколько камер и различные алгоритмы компьютерного зрения для обнаружения дефектов. Система была интегрирована с производственной линией, и позволяла автоматически отклонять дефектные изделия. Результат – значительное снижение количества брака и повышение качества продукции.
В процессе разработки мы столкнулись с проблемой распознавания дефектов, которые были очень маленькими и имели сложную форму. Для решения этой проблемы, мы использовали методы глубокого обучения. Мы обучили нейронную сеть на большом количестве изображений изделий с дефектами. Результат - система смогла точно обнаруживать даже самые маленькие и сложные дефекты.
В заключение
Система визуальной навигации – это мощный инструмент, который может значительно повысить эффективность работы многих предприятий. Но для того, чтобы реализовать этот потенциал, необходимо учитывать множество факторов, от выбора алгоритмов до интеграции с другими системами управления. Надеюсь, что мои размышления и опыт помогут вам лучше понять эту тему и использовать ее в своих проектах. Уверена, впереди еще много интересного в этой области, и мы продолжим совершенствовать наши технологии и предлагать клиентам лучшие решения.
ООО Циндао Шигуан Интеллект Технолоджи стремится быть в авангарде разработки и внедрения инновационных технологий в области автоматизации и робототехники. Наш опыт и знания позволяют нам решать самые сложные задачи, стоящие перед нашими клиентами.
Соответствующая продукция
Соответствующая продукция



Самые продаваемые продукты
Самые продаваемые продукты-
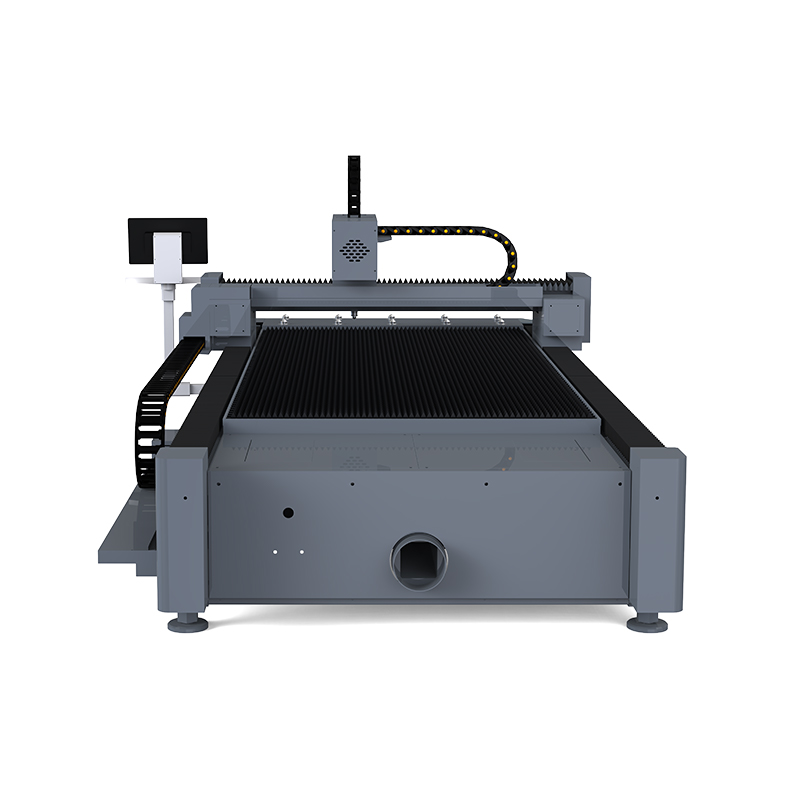
 Серия GL 14030: Напольный лазерный резак (возможна кастомизация)
Серия GL 14030: Напольный лазерный резак (возможна кастомизация) -
 Портальная система загрузки/выгрузки с материальным складом
Портальная система загрузки/выгрузки с материальным складом -
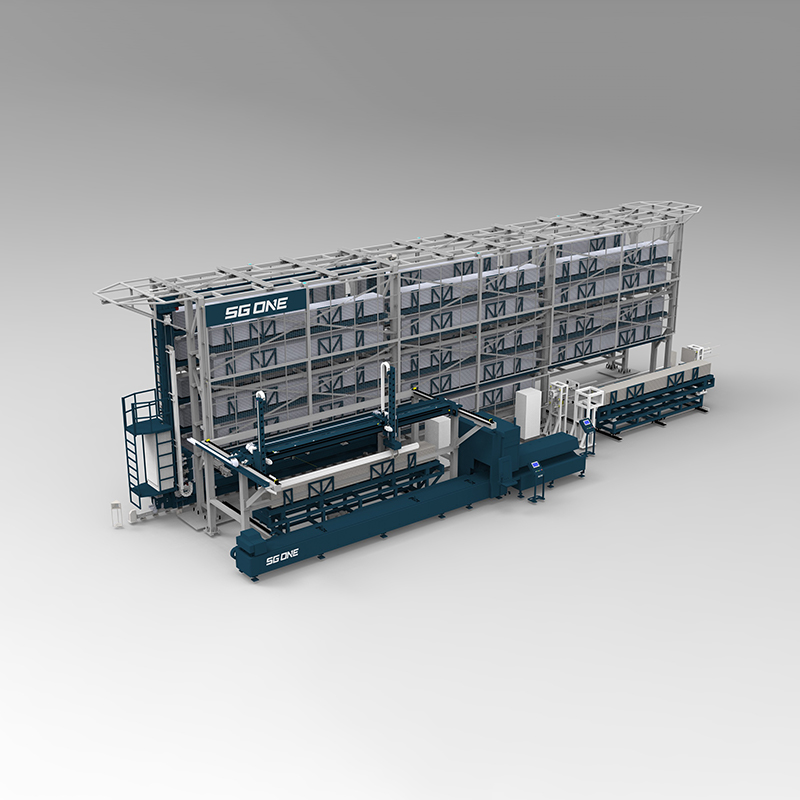 Многорядный склад трубных заготовок
Многорядный склад трубных заготовок -
 Лазерная сварочная установка
Лазерная сварочная установка -
 Стандартная установка для удаления заусенцев XDP-RPR
Стандартная установка для удаления заусенцев XDP-RPR -
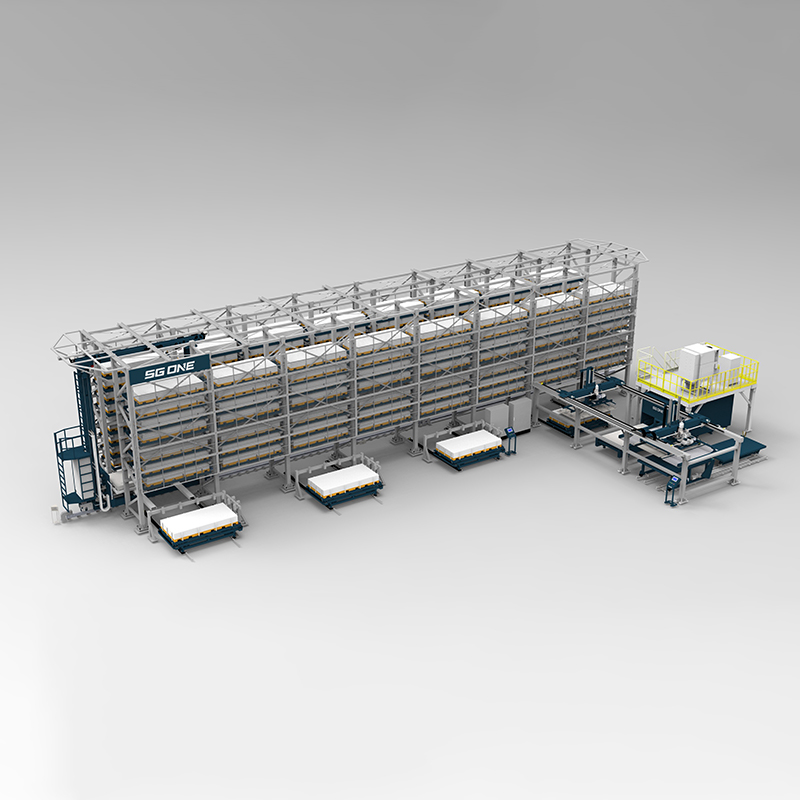 Многорядный склад листового металла с портальной загрузкой/выгрузкой
Многорядный склад листового металла с портальной загрузкой/выгрузкой -
 PBS150-3200 Листогибочный пресс с ЧПУ
PBS150-3200 Листогибочный пресс с ЧПУ -
 Стандартная установка для удаления заусенцев XDP-RP
Стандартная установка для удаления заусенцев XDP-RP -
 Роботизированная установка для удаления заусенцев
Роботизированная установка для удаления заусенцев -
 Стандартная установка для удаления заусенцев XDP-RRD
Стандартная установка для удаления заусенцев XDP-RRD -
 Стандартная установка для удаления заусенцев XDP-MRP
Стандартная установка для удаления заусенцев XDP-MRP -
 Роторно-рычажная система загрузки/выгрузки с материальным складом
Роторно-рычажная система загрузки/выгрузки с материальным складом
Связанный поиск
Связанный поиск- ведущий сварочный аппарат для дома
- OEM прецизионный гибочный станок
- высококачественный автоматическая лазерная сварочная система
- монтаж оснастки листогибочного пресса
- заводские поставки лазерных резаков Производитель
- OEM прецизионный листогибочный пресс
- высококачественный автоматизированная линия лазерной сварки
- гидравлические листогибочные прессы купить Производитель
- OEM беспилотная система транспортировки материалов
- ведущий станок для удаления микроскопических заусенцев

