
высококачественный загрузка с визуальным позиционированием
В последние годы наблюдается огромный интерес к автоматизации процессов загрузки материалов в производственных системах. Часто это сводится к простой задаче – переместить объект из точки А в точку Б. Но реальное применение высококачественной загрузки с визуальным позиционированием гораздо сложнее и требует учета множества факторов, которые часто упускаются из виду. Мы рассмотрим как общие принципы, так и конкретные проблемы, с которыми сталкиваемся на практике, основываясь на нашем опыте работы с различными отраслями.
Зачем вообще визуальное позиционирование? – развенчиваем мифы
Многие считают, что если есть датчики и роботы, то можно без проблем реализовать автоматическую загрузку. Однако, отсутствие визуального контроля может привести к критическим ошибкам. Простое обнаружение наличия объекта на платформе недостаточно, нужно точно определить его положение и ориентацию. Иначе, даже самые современные роботы могут не справиться с задачей, что приведет к простоям и переработке.
Вспомните, например, ситуацию с загрузкой деталей сложной формы на станок. Без визуального позиционирования даже незначительное смещение может привести к повреждению детали или станка. Точность в микронах – норма для многих современных производств, и просто 'на глаз' здесь не работает.
Мы сталкивались с ситуациями, когда клиенты изначально отказывались от визуального позиционирования, считая его излишним и дорогим. В итоге, в процессе эксплуатации, выяснялось, что затраты на исправление ошибок и переработку намного превышают стоимость внедрения системы визуального контроля.
Какие существуют подходы к визуальному позиционированию?
Существует несколько основных подходов к визуальному позиционированию: использование камер (2D и 3D), структурированного света, машинного зрения и комбинации этих технологий. Выбор зависит от требуемой точности, скорости обработки и сложности задачи. Камеры, например, подходят для относительно простых задач, требующих невысокой точности. Для более сложных случаев требуется более продвинутые методы, такие как 3D-сканирование и анализ изображений.
Особое внимание стоит обратить на алгоритмы обработки изображений. Они должны быть устойчивы к изменениям освещения, ракурса и другим внешним факторам. Это, пожалуй, самый сложный аспект внедрения визуального позиционирования.
Необходимо учитывать, что 'просто камере' зачастую недостаточно. Требуется разработка специфичных алгоритмов, адаптированных к конкретной задаче и используемому оборудованию.
Наши практические кейсы: успех и неудачи
В рамках работы с ООО Циндао Шигуан Интеллект Технолоджи мы реализовали несколько проектов, связанных с автоматизацией загрузки материалов. Один из самых интересных – автоматическая загрузка компонентов в печатные платы. Для этого мы использовали систему на основе 3D-камер и алгоритмов машинного зрения. Результат: повышение скорости загрузки на 40% и снижение количества брака на 25%.
Однако, не все проекты заканчивались успешно. Однажды мы столкнулись с проблемой – алгоритмы машинного зрения не справлялись с изменением цвета компонентов. Пришлось разработать новый алгоритм, учитывающий спектральный анализ изображений. Это потребовало значительных усилий и времени, но в итоге позволило решить проблему.
Еще один интересный случай – автоматическая загрузка сыпучих материалов. В этом случае, сложность заключается в невозможности получения четкого изображения. Для решения этой задачи мы использовали комбинацию датчиков и алгоритмов обработки данных. Это позволило нам добиться приемлемой точности позиционирования.
Проблемы, с которыми мы сталкиваемся чаще всего
Чаще всего возникают проблемы, связанные с качеством изображений. Плохое освещение, загрязнение объектива, размытие изображения – все это может негативно повлиять на точность позиционирования. Также часто возникают проблемы с калибровкой системы. Неправильная калибровка может привести к значительным ошибкам.
Кроме того, важно учитывать скорость работы системы. Чем быстрее должна быть загрузка, тем более мощным должно быть оборудование и тем более сложными должны быть алгоритмы обработки данных. Найти оптимальный баланс между точностью и скоростью – важная задача.
В случае с высококачественной загрузкой с визуальным позиционированием, не стоит недооценивать важность предварительной подготовки данных. Нужно тщательно проанализировать изображения и выбрать оптимальный алгоритм обработки. Часто необходимо проводить дополнительные эксперименты и вносить корректировки в алгоритм, чтобы добиться наилучших результатов.
Будущее автоматизации загрузки: что нас ждет?
В будущем, мы ожидаем дальнейшее развитие технологий машинного зрения и искусственного интеллекта. Это позволит создавать более гибкие и интеллектуальные системы автоматической загрузки. В частности, нас ждет развитие алгоритмов, способных работать в условиях неопределенности и адаптироваться к изменяющимся условиям.
Важным направлением развития является интеграция систем визуального позиционирования с другими системами автоматизации, такими как системы управления роботами и системы планирования производства. Это позволит создавать полностью автоматизированные производственные линии, которые смогут самостоятельно адаптироваться к изменяющимся требованиям.
Более того, развитие технологий компьютерного зрения, связанных с глубоким обучением, открывает новые горизонты в области высококачественной загрузки с визуальным позиционированием. Мы уверены, что в ближайшие годы мы увидим появление новых, более эффективных и надежных систем, которые смогут решить самые сложные задачи автоматизации.
Мы продолжаем работать над совершенствованием наших решений в этой области, и готовы предложить вам индивидуальные решения, соответствующие вашим потребностям. Если у вас есть вопросы, обращайтесь, мы всегда рады помочь.
Соответствующая продукция
Соответствующая продукция




Самые продаваемые продукты
Самые продаваемые продукты-
 Роботизированная установка для удаления заусенцев
Роботизированная установка для удаления заусенцев -
 Роторно-рычажная система загрузки/выгрузки
Роторно-рычажная система загрузки/выгрузки -
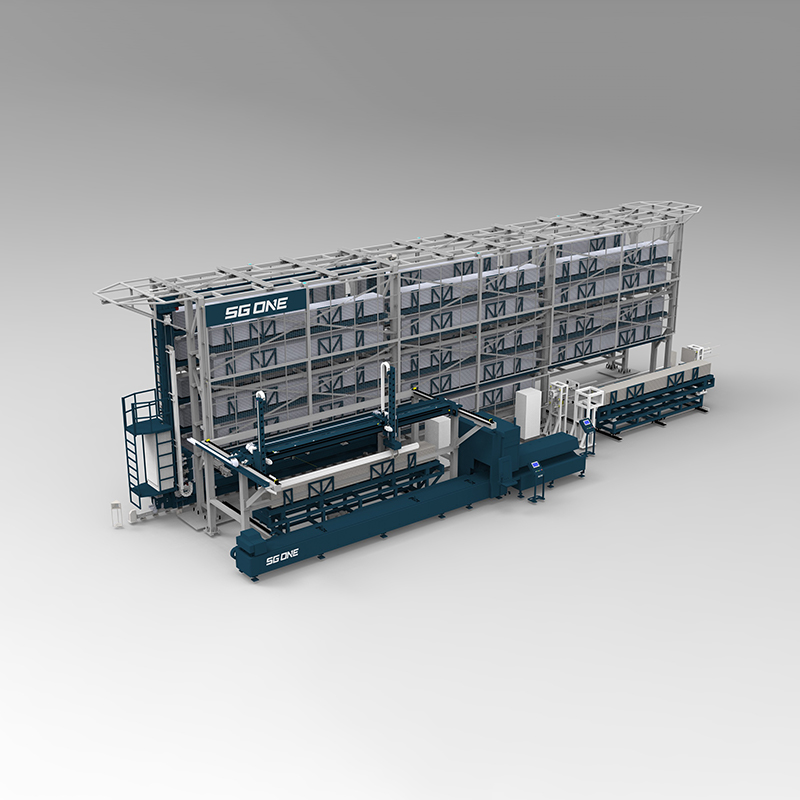
 Многорядный склад листового металла с портальной загрузкой/выгрузкой
Многорядный склад листового металла с портальной загрузкой/выгрузкой -
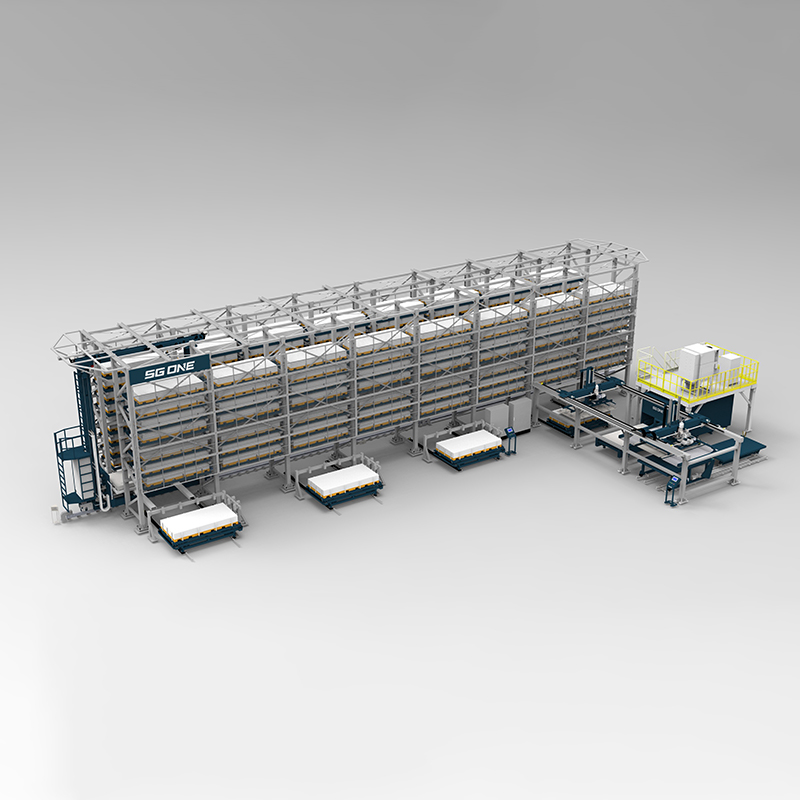
 Многорядный склад трубных заготовок
Многорядный склад трубных заготовок -
 Портальная система загрузки/выгрузки
Портальная система загрузки/выгрузки -
 Серия GP 6025: Лазерный резак с поворотной платформой
Серия GP 6025: Лазерный резак с поворотной платформой -
 Стандартная установка для удаления заусенцев XDP-RRD
Стандартная установка для удаления заусенцев XDP-RRD -
 PBS63-1500 Листогибочный пресс с ЧПУ
PBS63-1500 Листогибочный пресс с ЧПУ -
 Роботизированная сварочная система
Роботизированная сварочная система -
 Роторно-рычажная система загрузки/выгрузки с материальным складом
Роторно-рычажная система загрузки/выгрузки с материальным складом -
 Серия GL 14030: Напольный лазерный резак (возможна кастомизация)
Серия GL 14030: Напольный лазерный резак (возможна кастомизация) -
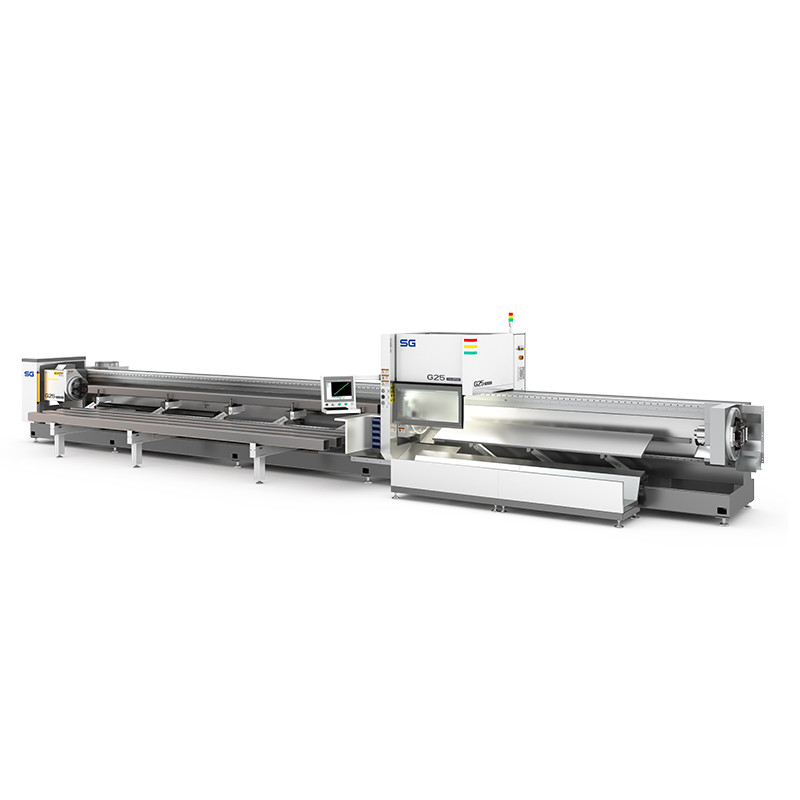
 Серия GTB: Трубный лазерный резак с 2 патронами
Серия GTB: Трубный лазерный резак с 2 патронами
Связанный поиск
Связанный поиск- точная лазерная сварочная машина Производители
- ведущий сварочный аппарат 190
- ведущий машина для предварительной обработки заусенцев перед нанесением покрытия
- интегрированная система складирования
- Китай экспортные гибочные прессы
- высококачественный точная лазерная сварочная машина
- Китай производитель листогибочных прессов
- Китай гидравлические листогибочные прессы купить
- ведущий волоконно-оптический лазерный режущий станок
- Китай CNC лазерный режущий станок

